
What's New
2022年11月 つくばチャレンジ2022の本走行で当研究室のロボット(いぶき2)が2年連続で完走しました。
2022年5月 Amazon Web Service 主催の AI による自動運転レース競技会であるAWS DeepRacer Student Japan Student Championshipで本研究室の学生が1位,2位,3位となりました。
2021年11月 つくばチャレンジ2021の本走行で当研究室のロボット(いぶき1)が2,500mのコースを完走しました。完走は出走56台中3台でした。
2020年5月 Amzonが主催するAWS Robot Delivery Challenge シミュレーション(予選)を、全国の大学等が参加した全118 チーム中,当研究室のチームが1位と2位で通過しました。
2019年10月 トランジスタ技術2019年10月号に記事が掲載されました。「内村 裕:確率統計処理で誤差の蓄積を最小化! 1kmの長距離自走に成功 自己位置推定ツール④ オドメトリ×カルマン・フィルタ」
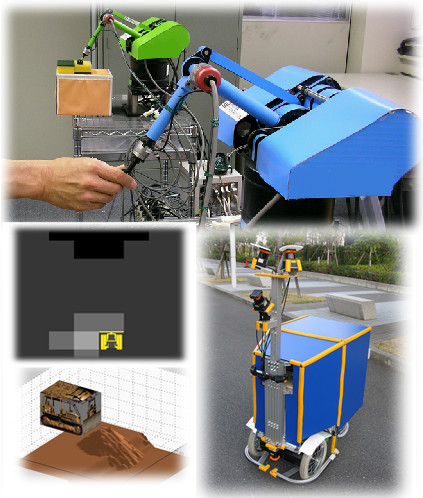
2019年3月 JAXAと鹿島建設、電気通信大学、京都大学と共同で行った研究「遠隔操作と自動制御の協調による遠隔施工システムの実現」の研究成果を公表しました。
2017年11月 つくばチャレンジ2017の本走行で当研究室のやまぶき7(出走順10,ロボットNO.1706-01)が2,000mのコースを完走しました。
2017年5月 ロボカップ@ホーム ジャパンオープン2017に参加し,優勝(エデュケーションリーグ),準優勝(シミュレーションリーグ)でした。
2017年3月 「廃炉のためのロボット技術コンペ(日本ロボット学会,日本原子力学会)」で優秀賞を受賞しました。
2016年6月 ロボカップ@ホーム 世界大会(ドイツ)で7位と健闘しました。




