研究内容 ( Research topics in English )
Research topics in English )
 通信遅延下における遠隔施工システムの開発(JAXA共同研究)
通信遅延下における遠隔施工システムの開発(JAXA共同研究)
人工知能(AI)による施工機械の自律動作制御
エレベータに自律搭乗するロボット
ネットワークの通信遅延を考慮したロボット制御に関する研究
屋外環境における自律移動ロボットの自己位置推定と制御(つくばチャレンジ)
無線ネットワークを自律中継する移動ロボットの制御
■通信遅延下における遠隔施工システムの開発(JAXA共同研究)
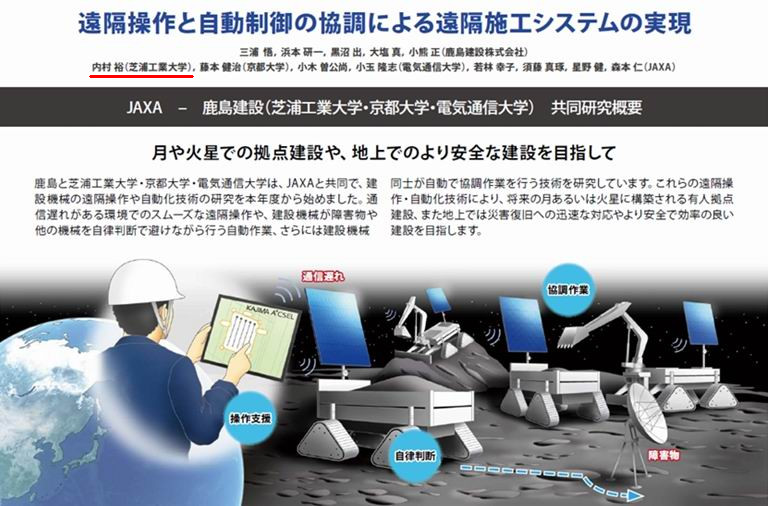
月面の拠点建設のための施工を,地球から遠隔操作で行うための研究をJAXAと共同で行っています。月と地球の間の通信には往復で数秒の遅延があるため,施工機械側の情報が地球に届くのに数秒,地球の操作者側の指令が機械に届くのにさらに数秒の遅れがあります。そこで,操作者(地球)に,施工機械の数秒後の動作を予測したバーチャルなモデルを提示し,遅れを補償した操作環境を提示します。
関連論文:
・Y. Hatori, Y. Uchimura, "Obstacle Avoidance during Teleoperation by Model Predictive Control with Time-varying Delay", IEEJ Journal of Industry Applications Vol.12, No.2, pp.117-124 (2023)
・H. Arai, H. Nagakura, Y. Uchimura, "Model Predictive Control with Variable Predictive Horizon for Remote Control System including Variable Delay", IEEJ Journal of Industry Applications Vol.11, No.3, pp. 419-426 (2022)
・小林 浩司, 内村 裕,"モデルベース予測制御による時間遅れを有する遠隔システムの制御", 電気学会論文集D産業応用部門誌, Vol.138, No. 4, pp. 323-329, (2018)
■ 人工知能(AI)による施工機械の自律動作制御
人工知能(AI)分野における機械学習という手法によって,機械が自ら学習(知能を取得)して自律的に作業を行うことを目指しています。
機械には何をすべきかは教えずに,作業が達成されると報酬(スコア)を与えます。
最初はランダムに動きますが,繰り返し動作するうちに,どう動けば報酬が得られるかを徐々に学習し,やがて最適な動作を行うようになります(深層強化学習)。
本研究では,ブルドーザで土砂を撒き出すための経路制御を,ニューラルネットに基づく強化学習手法(PPO,PPO+LSTM)によって最適化しています。
ブルドーザで土砂を運ぶ動きを算出する土砂シミュレータを開発
開発したシミュレータによってディープラーニングの手法であるPPOとLSTMで学習を行い撒き出し経路を最適化
上方からブレード(黄色)の動きを表示
関連論文:
・Y. Uchimura, "Optimization of Path Planning of Bulldozer by Deep Reinforcement Learning with Sediment Simulator"
Proceeding of The IEEJ International Workshop on Sensing, Actuation, Motion Control, and Optimization pp.207-212 (2024)
・Y. Osaka, N. Odajima, Y. Uchimura, "Route optimization for autonomous bulldozer by distributed deep reinforcement learning", IEEE International Conference on Mechatronics (ICM2021) (2021)
・田邊 峻也,孫 澤源,中谷 優之,内村 裕,"深層強化学習による施工機械の経路生成", 第32回人工知能学会全国大会 (2018)
・中谷 優之, 孫 澤源, 内村 裕, "深層強化学習による施工機械の経路制御", 電気学会産業応用部門大会, (2017)
・中谷 優之, 孫 澤源, 内村 裕, "深層強化学習による施工機械の知能化", ロボティクス・メカトロニクス講演会, (2017)
■ エレベータに自律搭乗するロボット
既存のエレベータに自らボタンを押して,エレベータ内の人を認識して搭乗するロボットです。レーザセンサで人とエレベータ内の空間を計測し,人との距離を最大化する搭乗目標位置を算出しています。
詳細はこちら
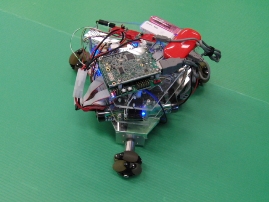
■屋外環境における自律移動ロボットの自己位置推定と制御(つくばチャレンジ)
市街地のような人の生活空間の中で,ロボットが自律的移動するための技術の向上を目指し,屋外環境下で自己位置を推定しながら,目的地に確実に到達するロボットの開発を行っています.同技術の研鑽と検証のため つくばチャレンジにも2010年から出場しています。
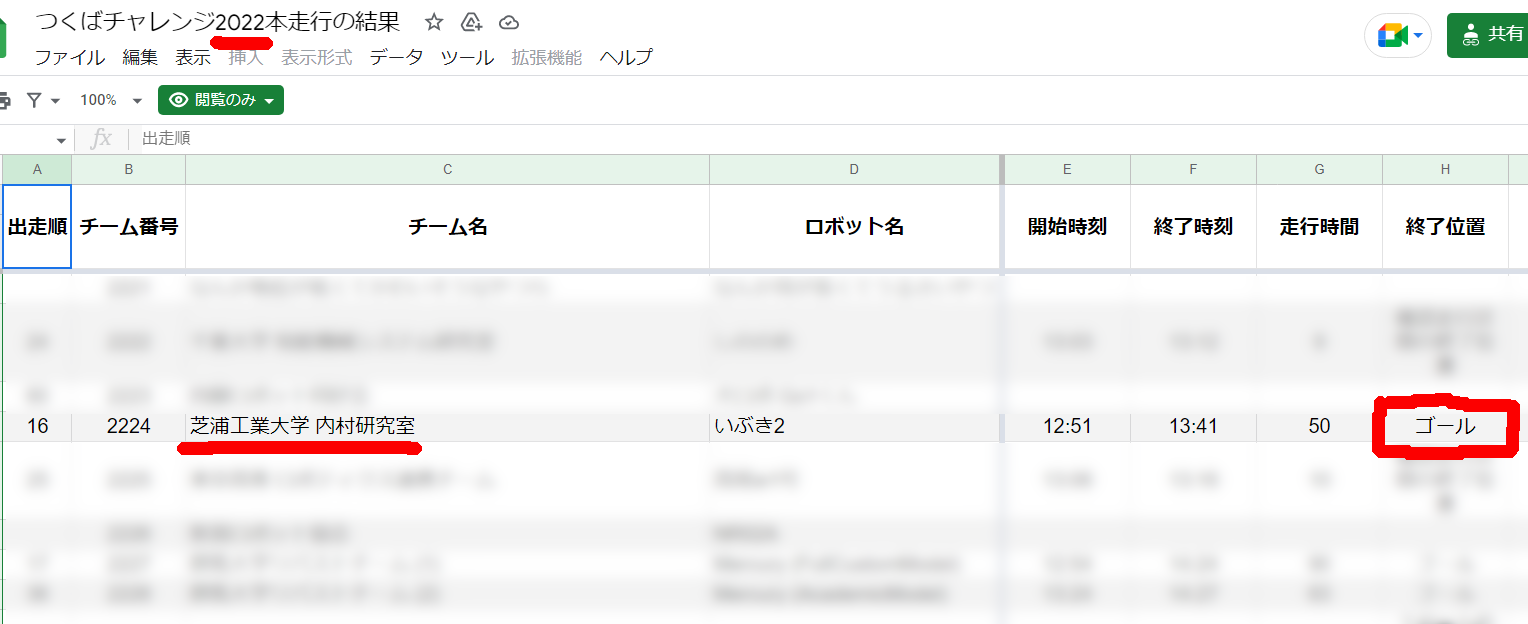
2022年度も2021年度に引き続き,完全自律走行で2,000mのコースを完走しました!

関連論文:
・M. Nomatsu, Y. Suganuma, Y. Yui, Y. Uchimura, "Development of an Autonomous Mobile Robot with Self-Localization and Searching Target in a Real Environment", Journal of Robotics and Mechatronics, Vol.27, No.4, pp.356-364 (2015)
・小宮康平, 宮下隼輔, 丸岡 泰, 内村 裕, "探索範囲を最適化したマップマッチング法による自律移動ロボットの制御", 電気学会論文誌D, Vol. 133, No. 5, pp. 502-509 (2013)


つくばチャレンジで走行中の自律移動ロボット
つくばチャレンジゴール(完走)
ページトップへ
■ネットワークの通信遅延を考慮したロボット制御に関する研究
コンピュータネットワークを介して情報を伝達する場合には,一方から送信された情報がもう一方で受信されるまでには時間がかかります。衛星によるテレビ中継で,会話のタイミングがかみ合わないことがあるのも通信遅延によるものです。この通信遅延は,ネットワークを介してロボットの制御を行う場合にも,制御に悪影響を及ぼし,ロボットの性能を下げたり,制御が不安定になって暴走を引き起こしたりします。この悪影響をできるだけ小さくし,より良い性能を実現できるよう研究を行っています。

ネットワークで接続した遠隔操作ロボット
スポンジの表と裏の硬さの違いの感触が伝わっています
関連論文:
・長原正法, 荒井慎悟, 内村 裕, "周波数依存性能重みによる変動時間遅れシステムのロバストH∞制御", 電気学会論文集D, Vol.132, No.6, pp.616-624, (2012)
・山田 悠, 吉澤 歩, 内村 裕, "リアルタイム制御のための無線ネットワークの中継機構", 電気学会論文集D, Vol.131, No.3, pp. 364-371, (2011)
・内村 裕,島野浩樹, "ネットワークベースの制御系における変動通信遅延とモデル化誤差の補償", 電気学会論文集D, Vol.130, No.3, pp. 326-333, (2010)
ページトップへ
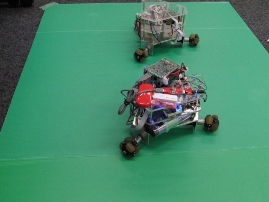
■無線ネットワークを自律中継する移動ロボットの制御
地震等の災害時には,既存の通信インフラが使用できない可能性があります。このため,災害後のレスキュー活動を支援するロボットは,独自の無線通信網を構築する必要があります。
そこで本研究では,車輪等の移動機構を有する複数の移動ロボットによって無線ネットワークを構成し,リモートセンシング,遠隔制御等のアプリケーションへの適用を目指しています。無線ネットワークは電波環境によって大きく影響を受けるため,ノードから取得する受信信号強度を監視して,良好な通信環境を維持しながら最適な位置に移動するための制御を実現します。
関連論文:
・今泉貴敬, 村上博行, 内村 裕, "ボロノイ分割を応用した無線中継移動ロボットの配置制御", 電気学会論文集D, Vol.132, No.3, pp.381-388, (2012)
中継実験の動画(左画面 ゴール地点から,右画面 スタート地点から)
全方位移動ロボット
ページトップへ
Topへ