
Research Topics ( Research topics in English )
Research topics in English )
 Development of remote construction system under communication delay (JAXA joint research)
Development of remote construction system under communication delay (JAXA joint research)
Autonomous control of construction machinery by Artificial Intelligence (AI)
Research on robot control considering communication delay of network
Control of Autonomous Mobile Robots in Outdoor Environments (Tsukuba Challenge)
Control of a mobile robot that relays autonomously over a wireless network
Motion control with non-contact magnetic gears
■Development of remote construction system under communication delay (JAXA joint research)
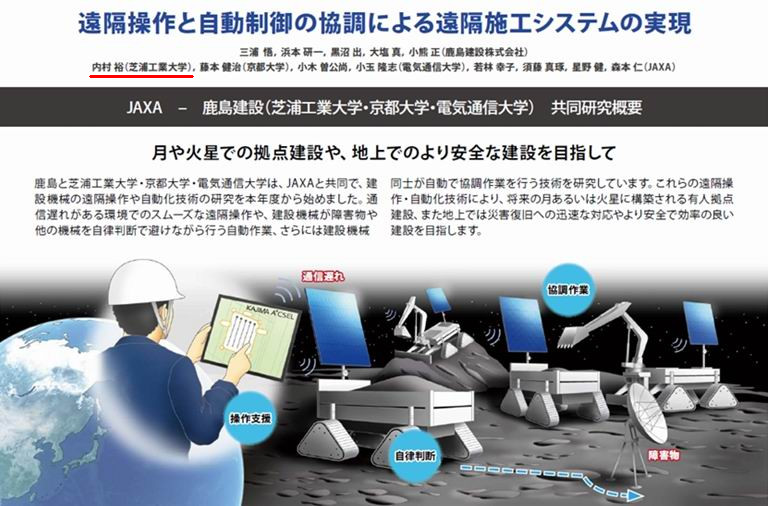
We are collaborating with JAXA on research for remote-controlled construction of bases on the Moon from Earth. Since there is a several-second round-trip communication delay between the Moon and the Earth, there is a several-second delay for information from the construction machine to reach the Earth, and a further several-second delay for commands from the operator on the Earth to reach the machine. Therefore, a virtual model that predicts the operation of the construction machine a few seconds later is presented to the operator (Earth), and an operating environment that compensates for the delay is presented.
Reference papers:
・K. Kobayashi, Y. Uchimura,"Model based Predictive Control for Tele-operational Control System with Time Delay .", IEEJ Transactions on Industry ApplicationsIEEJ Transactions on Industry Applications, Vol.138, No. 4, pp. 323-329, (2018)
■ Autonomous control of construction machinery by Artificial Intelligence (AI)
We utilize machine learning in the field of artificial intelligence (AI) to enable machines to learn (acquire intelligence) and perform tasks autonomously on their own.
The machine is not told what to do, but is given a reward (score) when the task is accomplished.
At first, the machine moves randomly, but as it performs the operation repeatedly, it gradually learns how to obtain the reward and eventually performs the optimal operation (deep reinforcement learning).
In this research, a simulation screen of a bulldozer filling a hole with earth and sand is input to a convolutional neural network (CNN), and reinforcement learning is performed using a learning method called DDQN (Double Deep Q Network).
For a detailed explanation of deep reinforcement learning, click here.
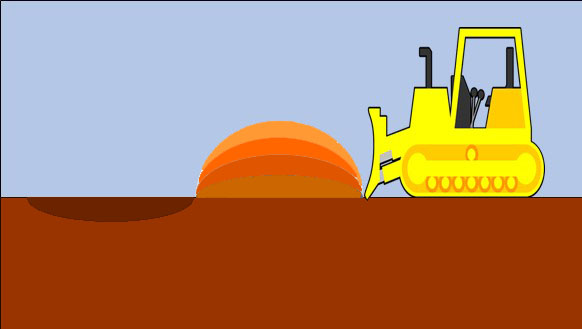
Sediment height expressed in terms of lightness (light=high, dark=low)
The bulldozer is autonomously filling the upper hole (dark brown) with earth and sand (light brown).
This is the result of the machine's own learning.
The machine learned by itself. There are four levels of sand height, and the color becomes lighter as more sand is piled on top.
Additional earth and sand can be added to fill in (clear) larger holes.
Related Papers:
・S. Tanabe, T. Sun, H. Nakatani, Y. Uchimura,"Route Optimization of Construction Machine by Deep Reinforcement Learning", Vol.139 (4), pp.401-408,
■Research on robot control considering communication delay of network
When information is transmitted over a computer network, it takes time for information sent from one party to be received by the other party. Communication delays are also the reason why the timing of conversations in satellite TV relays sometimes do not match. This communication delay can also have a negative impact on robot control over a network, reducing robot performance and causing unstable control that can lead to runaway behavior. We are conducting research to minimize these negative effects and achieve better performance.

Networked tele-operated robots
The feel of the difference in hardness between the front and back of the sponge is being conveyed.
Reference papers:
・M. Nagahara, S. Arai, Y. Uchimura, "Robust H∞ Control for Time-Varying Delay Systems with Frequency-Dependent Performance Weights", IEEJ Transactions on Industry ApplicationsIEEJ Transactions on Industry Applications, Vol.132, No.6, pp.616-624, (2012)
・Y. Yamada, A. Yoshizawa, Y. Uchimura, "A Relay Structure for a Wireless Network for Real-Time Control", IEEJ Transactions on Industry ApplicationsIEEJ Transactions on Industry Applications, Vol.131, No.3, pp. 364-371, (2011)
・Y. Uchimura, H. Shimano, "Network-Based Control with Compensation for Time-Varying Delay and Modeling Error", IEEJ Transactions on Industry ApplicationsIEEJ Transactions on Industry Applications, Vol.130, No.3, pp. 326-333, (2010)
Go to the top
■Control of Autonomous Mobile Robots in Outdoor Environments (Tsukuba Challenge)
We are developing a robot that can reliably reach its destination while estimating its own position in an outdoor environment, with the aim of improving technology for autonomous movement of robots in human living spaces such as urban areas. Since 2010, the team has also participated in the Tsukuba Challenge to study and verify the same technology.
In FY2021, it completed a 2,500-meter course in fully autonomous operation!

Reference papers:
・M. Nomatsu, Y. Suganuma, Y. Yui, Y. Uchimura, "Development of an Autonomous Mobile Robot with Self-Localization and Searching Target in a Real Environment", Journal of Robotics and Mechatronics, Vol.27, No.4, pp.356-364 (2015)
・Y. Komiya, S. Miyashita, Y. Maruoka, Y. Uchimura, " Control of Autonomous Mobile Robot Using Map Matching with Optimized Search Range ", IEEJ Transactions on Industry ApplicationsIEEJ Transactions on Industry Applications, Vol. 133, No. 5, pp. 502-509 (2013)


Autonomous mobile robot in Tsukuba Challenge 2021
Obstacle Avoidance Action
Go to the top
■Control of a mobile robot that relays autonomously over a wireless network
During disasters such as earthquakes, existing communication infrastructure may not be available.
Therefore, robots that support rescue activities after a disaster need to build their own wireless communication network.
In this research, we aim to configure a wireless network of multiple mobile robots with wheels and other mobility mechanisms, and apply it to applications such as remote sensing and remote control. Since the wireless network is greatly affected by the radio environment, the received signal strength obtained from the nodes is monitored to realize control to move to the optimal position while maintaining a good communication environment.
Reference papers:
・T. Imaizumi, T. Murakami, Y. Uchimura, "Deployment Control of Wireless Multi-Hop-Relay Mobile Robots Based on Voronoi Partition", IEEJ Transactions on Industry ApplicationsIEEJ Transactions on Industry Applications, Vol.132, No.3, pp.381-388, (2012)
Video of the relay experiment (left screen from the goal line, right screen from the start line)
Omni-directional mobile robot
Go to the top
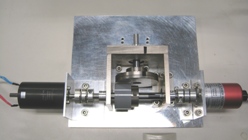
■Motion control with non-contact magnetic gears
Controlling a New Mechanical Element: Magnetic Gears!
We are conducting research on motion control of "magnetic gears," a new mechanical element that overcomes the shortcomings of conventional gears.
Magnetic gears are machine elements that use magnets to transmit power without contact. We are utilizing the features of magnetic gears to perform velocity control, position control, and sensorless force control by making full use of various control theories. Furthermore, this research aims to realize sensorless force feedback for robot manipulators.
Reference papers:
・H. Komiyama, Y. Uchimura, "Contactless Magnetic Gear for Robot Control Application", IEEJ Transactions on Industry Applications, Vol. 132, No. 3, pp. 389-396, (2012)

Click here to watch the video! (wmv format) Click here to watch the video! (wmv format)
Go to the top
Topへ